

Result description
We propose OROS, a novel orchestration approach that minimizes mission-critical task completion times as well as overall energy consumption of 5G-connected robots by jointly optimizing robotic navigation and sensing together with infrastructure resources. We validate our 5G-enabled collaborative framework by means of Matlab/Simulink, ROS software and Gazebo simulator. Our results show an improvement in exploration task by exploiting 5G orchestration features for battery savings when using multiple robots.
Addressing target audiences and expressing needs
- Help in technical expertise
- Use of research Infrastructure
- Collaboration
Collaboration and Technical Expertise
- Public or private funding institutions
- Research and Technology Organisations
R&D, Technology and Innovation aspects
Working Prototype has been validated in experimental settings accounting for a dedicated 5G infrastructure and multiple 5G-enabled mobile robots.
Result submitted to Horizon Results Platform by NEC LABORATORIES EUROPE GMBH
 Please
Please  Get instant access to tailored funding opportunities that perfectly match your needs. This powerful feature is exclusively available to our premium members—helping you save time, stay ahead of the competition, and secure the right funding faster.
Get instant access to tailored funding opportunities that perfectly match your needs. This powerful feature is exclusively available to our premium members—helping you save time, stay ahead of the competition, and secure the right funding faster. Curious about who’s viewing your listings? Unlock insights into your last 20 visitors and discover potential leads instantly!
Curious about who’s viewing your listings? Unlock insights into your last 20 visitors and discover potential leads instantly! 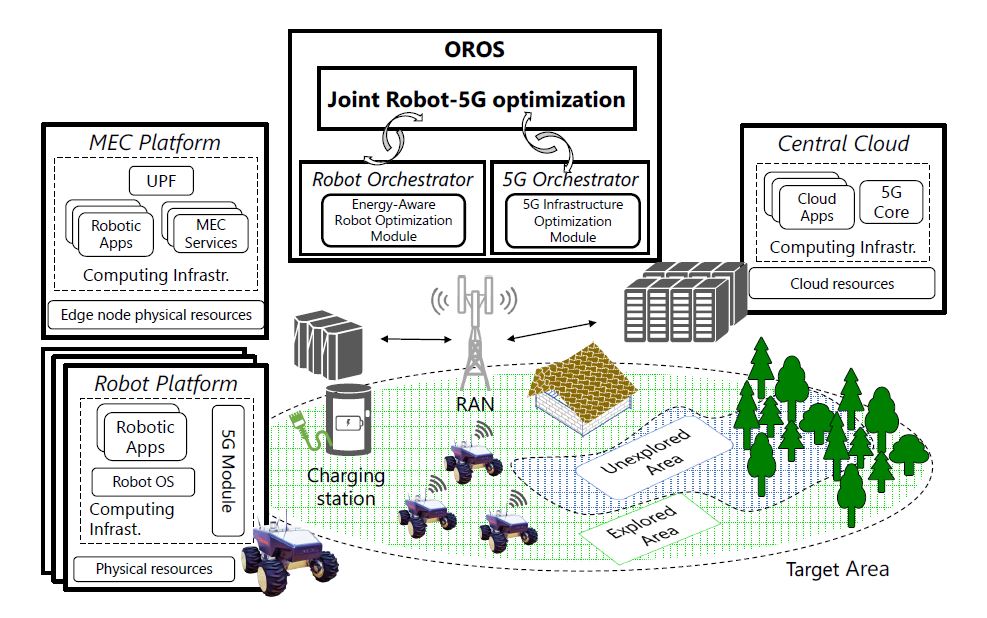{kind=link}