
Result description
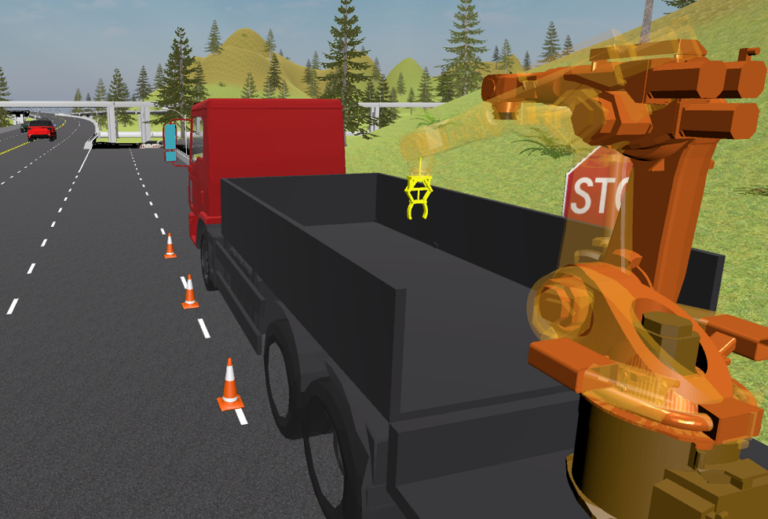
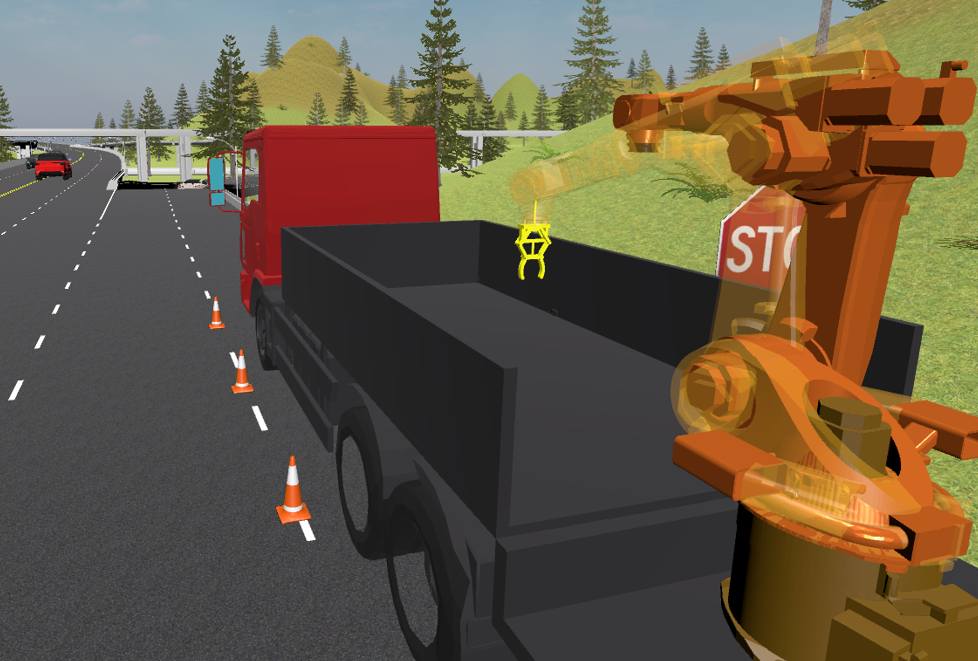
The web-based VR platform for the teleoperation of the robotic resources in road maintenance. This solution will allow road operators to take part in interventions remotely, without needing to be on the road. To make the teleoperation efficient in real-time the virtual environment is created/updated from on-site sensors, specifically cameras, allowing the operator to feel the environment as close as possible to the real one. The communication of the virtual reality application and the remote robot is based on a remote ROS connection. This is a way to easy control the robot without rigid programming.
The teleoperation platform is specifically designed for the sealing of pavement cracks and cleaning of signals.
Part of this solution is also a VR training tool for inexperienced operators, simulating all the interventions covered by the OMICRON project, where the operator can train safely, and track their progress through useful metrics.
Addressing target audiences and expressing needs
- Collaboration
- Fellowship to advance my/our research
We aim to provide this platform to interested parties, not only in the road infrastructure sector, but also in other sectors.
- Other Actors who can help us fulfil our market potential
- Research and Technology Organisations
- Academia/ Universities
R&D, Technology and Innovation aspects
The solution is currently being tested in the OMICRON project. Next steps will include using the tool for the provision of training services for research and industrial sectors. Also, further R&D will be conducted to develop the tool further and make it applicable in other use cases and sectors.
The solution is highly adaptable to different situations.
The value created by this solution is a solid basis for sustainable business models.
- Greece
- Global
- Europe
Result submitted to Horizon Results Platform by PANEPISTIMIO PATRON
{kind=link}